Update hyper parameter example and add documentation
Showing
- docs/hyperparameters.txt 59 additions, 0 deletionsdocs/hyperparameters.txt
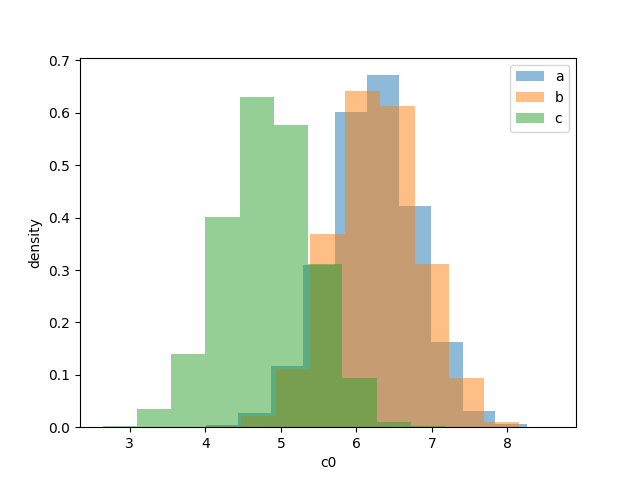
- docs/images/hyper_parameter_combined_posteriors.png 0 additions, 0 deletionsdocs/images/hyper_parameter_combined_posteriors.png
- docs/images/hyper_parameter_corner.png 0 additions, 0 deletionsdocs/images/hyper_parameter_corner.png
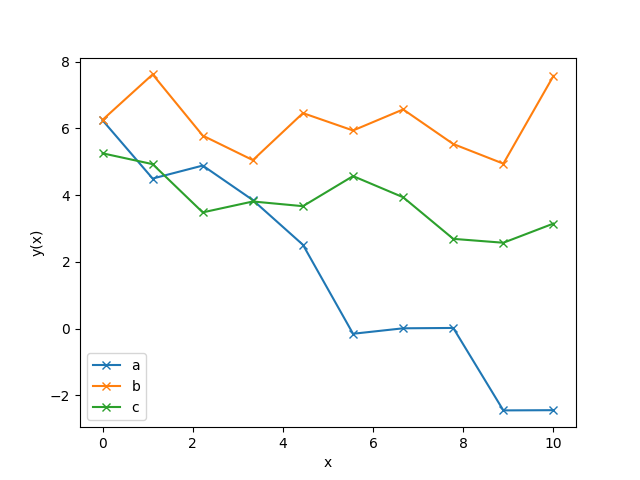
- docs/images/hyper_parameter_data.png 0 additions, 0 deletionsdocs/images/hyper_parameter_data.png
- docs/index.txt 1 addition, 0 deletionsdocs/index.txt
- examples/other_examples/hyper_parameter_example.py 81 additions, 41 deletionsexamples/other_examples/hyper_parameter_example.py
docs/hyperparameters.txt
0 → 100644
{kind=link}
11.6 KiB
docs/images/hyper_parameter_corner.png
0 → 100644
{kind=link}

121 KiB
docs/images/hyper_parameter_data.png
0 → 100644
{kind=link}
30.1 KiB